
山岳トンネル 「全自動鋼製支保工建込みロボット」を開発! (特許出願中)~ワンボタンで鋼製支保工建込みが可能に~
< 概 要 >
インフロニア・ホールディングス株式会社(本社:東京都千代田区、社長:岐部一誠)グループの前田建設工業株式会社(本社:東京都千代田区、社長:前田操治、以下「前田建設工業」)は、山岳トンネルにおける鋼製支保工の建込みを自動化する「全自動鋼製支保工建込みロボット」を開発しました。また、前田建設工業のICI総合センター(茨城県取手市)に建設した模擬トンネル(2022年1月竣工)にて改良・検証を行い、現場適用に向けて動作性能を確認しました。

模擬トンネルにおける全自動鋼製支保工建込みロボット全景
< 背 景 >
過去に当社が開発した技術※1,2は、マシンガイダンスによる鋼製支保工の位置合わせであり、オペレータはナビ画面と実際の建込み状況を同時に確認しながら建込み操作をする必要があるため、オペレータが操作に慣れるまでに時間がかかっていました。また、鋼製支保工位置を把握する測量用ミラーについては、位置合わせ完了後、安全な場所から竿や網を使用して人力で回収していました。
※1 2019年11月18日発表:https://www.maeda.co.jp/news/2019/11/18/4998.html
※2 2020年10月07日発表:https://www.maeda.co.jp/news/2020/10/07/5025.html
< 詳 細 >
前田建設工業は、オペレータの技量に依存せず、ワンボタンで鋼製支保工建込みが可能である「全自動鋼製支保工建込みロボット」を開発しました。
本技術は、従来技術を構成していた3つの要素(①支保工位置追尾システム、②高性能エレクタマシン、③自動建込用鋼製支保工)を制御するシステムと測量用ミラー自動回収機構で構成しています。
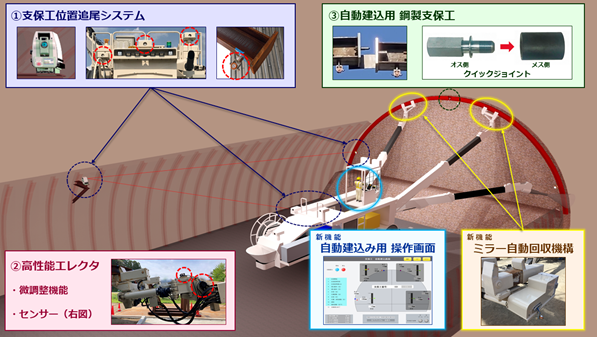
全自動鋼製支保工建込みロボット 概要図
(1)制御システム
本技術は、建込みの動作指示をタブレットで行います。タブレット操作画面にある「自動建込み開始ボタン」をタップすると、計測から鋼製支保工建込み終了までの一連の動作を全自動で行います。そのほか、建込み状況を可視化する機能を備えており、測量結果や鋼製支保工の建込み位置をリアルタイムに表示します。
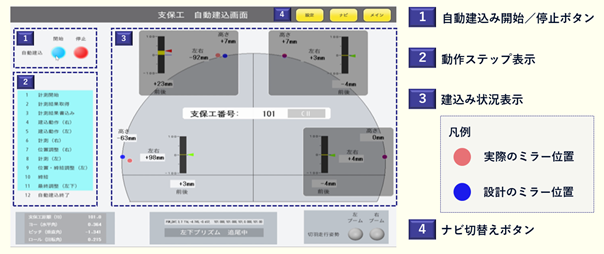
全自動鋼製支保工建込みロボット 操作画面(イメージ)
本技術による鋼製支保工の建込み順序は、以下の通りです。
※下写真は切羽側から撮影しています。文書は坑口側から切羽側を見た場合の説明です。
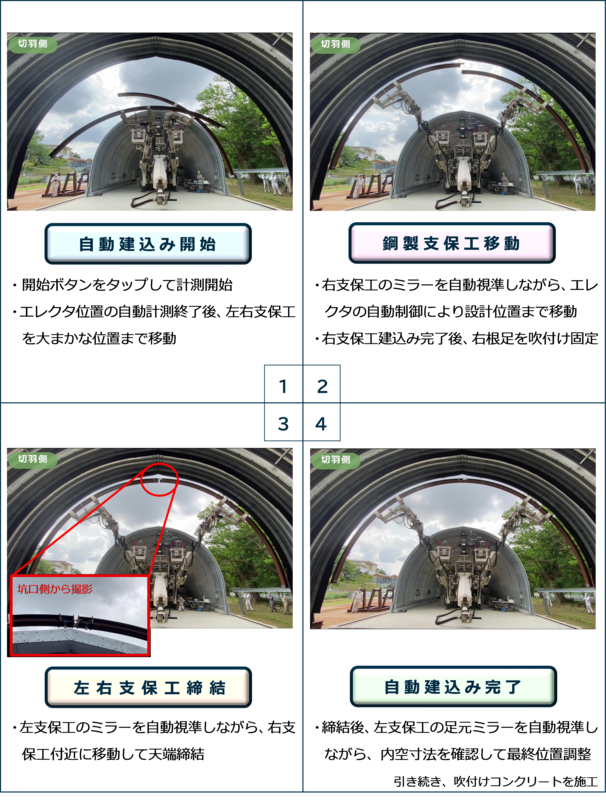
全自動鋼製支保工建込みロボットにおける支保工の建込み順序
(2)測量用ミラー自動回収機構
本機構は、エレクタのクランプ部に小型ウィンチを設置し、けん引ロープを巻き取ることで測量用ミラーを自動回収します。運用においては、鋼製支保工の建込み前にウィンチからけん引ロープを引き出し、鋼製支保工の天端と足元にミラーを設置してから建込み動作に移行します。建込み完了後、吹付けコンクリートを施工する前にリモコンを操作して各ミラーを回収します。
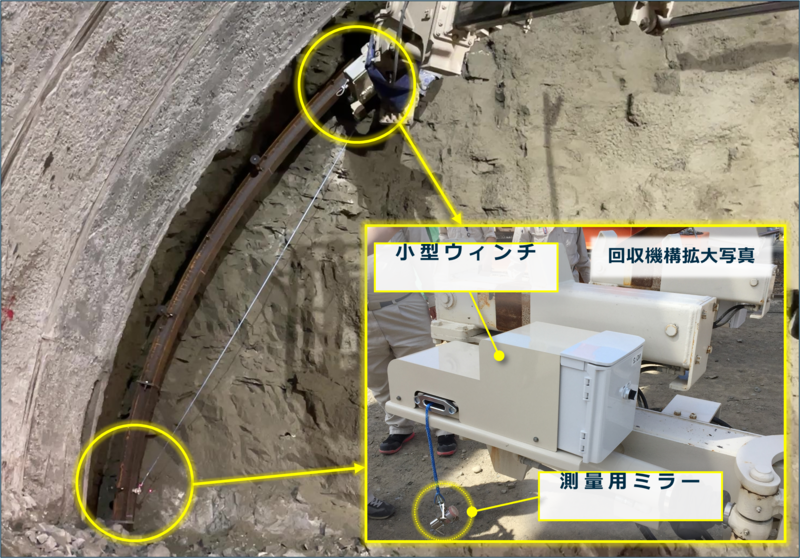
測量用ミラー自動回収機構 適用状況
< 効 果 >
①本技術は、オペレータの技量や経験に依存せず鋼製支保工の建込み作業が可能です。
②本技術は、過去に当社が開発したガイダンスによる建込みロボットよりも作業を効率化できます。
・過去技術:ガイダンスを見ながら操作 作業時間 12分
・新技術:スタートボタンのタップのみ 作業時間7.5分※3
③測量用ミラーの回収は遠隔で操作できるため、鋼製支保工建込み作業時に切羽直下に立入る人員をゼロにできます。
※3 模擬トンネルで試験した際の値です。
今後、本ロボットを現場に導入して性能の検証を行うとともに、本ロボットの普及に努め切羽の肌落ち災害撲滅と掘削作業における生産性向上に寄与してまいります。
< 問い合わせ先 >
前田建設工業株式会社
経営革新本部 広報部
E-Mail:maeda-release@jcity.maeda.co.jp